Palubní počítadlo V1 pro Raptor 60
V době, kdy jsem si pořídil nový model Raptor 60 se spalovacím motorem, jsem se rozhodl si svépomocí vyrobit malý
a přesný teploměr signalizující hranici přehřátí motoru pomocí LED. Jeho účelem mělo být v první řadě signalizovat LEDkou překročení povolené teploty motoru blikáním a naopak nízkou teplotu trvalým svitem. V pásmu provozní teploty motoru by LEDka nesvítila. Během vývoje teploměru však došlo na jeho rozšíření funkcí a o možnost zobrazení dat na TFT displeji.
Postaveno na základě mikroprocesoru PIC16F84A.
Funkce:Základem je microchip PIC 16F84A Ke stažení:Projekt PIC v MPLAB V8.50 - ZIP soubor Popis:
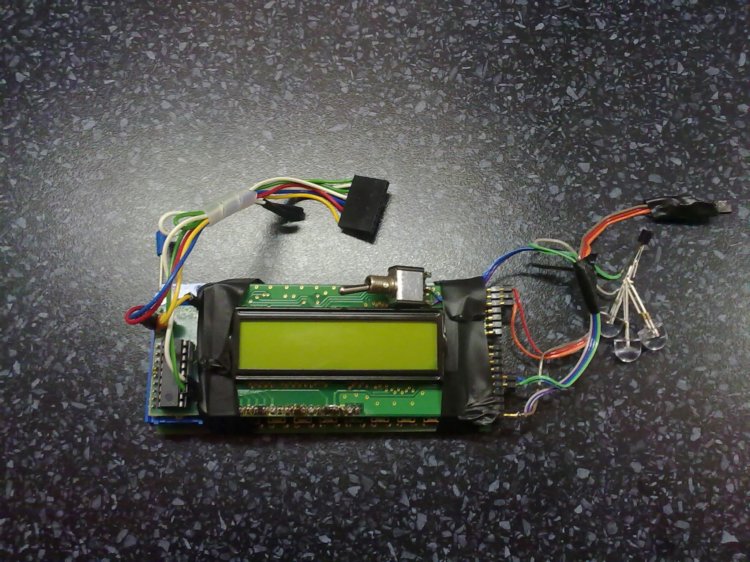
Základem celého zařízení je mikroprocesor PIC16F84A s hodinovým krystalem 3.7268MHz a k měření teploty motoru je použito digitální teplotní čislo DALLAS DS18B20. Zobrazuje na TFT displeji 2x16 znakůs řadičem HD44780 aktuální teplotu motoru po půl stupních Celsia. Nad sto stupňů Celsia se teplota zobrazuje po celých stupních. V pravo zobrazuje maximální teplotu motoru dosaženou během letu. Ta se po každém zapnutí napájení vynuluje a platí tedy jen pro daný let. Ve spodním řádku se vlevo načítá a zobrazuje počet startů modelu. Přičtení startu má svá pravidla. K přičtení může dojít pouze až když je motor nastartován. Chod motoru se načítá ze snímače governoru GV-1 instalovaným na modelu. Je to ošetřeno programem a k aktivaci načítání času doje až za podmínky, že má motor více jak 2500 otáček za minutu. Během jednoho zapnutí je možné přičíst pouze jeden start. Tím je zajištěno, že pokud bude motor startován vícekrát, nedojde k přičítání neplatných počtu startů. V pravo ve spodním řádku je pak zobrazen čas, po který je motor v chodu. Načítá se po vteřinách. Aby bylo zajištěno správné ukládání času a počtu startů v PIC a aby nedocházelo k častému zápisu do EEPROM, ukládá se pouze při startu motoru a po jeho zhasnutí. Tím by měl být zajištěn správný zápis do EEPROM aniž by byl překročen počet zápisů a přesnost načítání času. Zápisů do EEPROM je možno až 1 000 000. Je i ošetřen správný cyklus hodin. Ten je naprogramován s přesností až 2 sekundy na 24 hodin. Což je naprosto dostačující. Původně nebylo zamýšleno přesné měření chodu motoru. Motohodiny se měli spínat až po dosažení určité teploty motoru. Ale jelikož je v modelu instalován governor od Futaby GV-1, bylo třeba toho využít. Počítadlo již bylo ale naprogramované a nechtělo se mi do něj opět zasahovat. A tak jsem zvolil daleko rychlejší postup a to další PIC se stabilizátorm v jednom. Stabilizátor na výstupu udrží prakticky rovných pět voltů i pokud je nastavím na BECu modelu. Programově se testuje chod motoru a na výstup se nastaví logcká jednička pokud má motor více jak 2500 otáček za minutu. To je signalizováno červenou LEDkou na zařízení. Programem je zajištěná čtecí smyčka impulzů od snímače GV-1. Pokud magnet na ventilátoru motoru proběhne kolem hallova snímače GV-1, změní se jeho výstup na H. Programem je tak ošetřeno čtení těchto impulzů tak, že motor musí opravdu běžet, aby došlo aktivaci výstupu pro počítadlo. Sledují se tak impulzy ze snímače, který musí přijít po sobě v daném časovém intervalu. Rovněž je zajištěno, že čas motohodin nebude načítat pokud se magnet zastaví přímo u snímače. Opět nedochází ke změnám stavu a tak to není bráno za chod motoru. Na úvodním obrázku je vidět celá jednotka počítadla. Na horní straně má instalované tři bílé LEDky. Na pravé straně je připojovací konektor na němž je přivedeno stabilizované napájecí napětí 5.0V, připojený signál sledující chod motoru a připojené digitální čidlo pro měření teploty motoru. Na přední straně je konektor pro připojení TFT displeje a na levé straně je konektor pro možnost programování PIC nebo čtení/zápis dat z EEPROM pomocí programátoru.
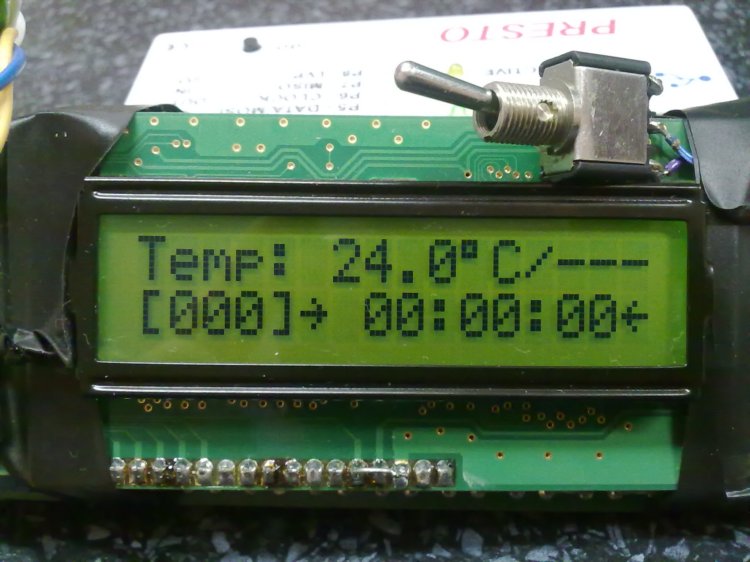
Obrazovka po zapnutí modelu. Aktuální teplota, místo pomlček se po startu zobrazí maximální teplota motoru. Dole pak v uvozovkách počet startů modelu a mezi šipkama čas běhu motoru.
Obrazovka po zapnutí zařízení, během prvních dvou vteřin dojde k inicializaci zařízení a načtení teploty motoru. Ukázka na vývojové desce.
Obrazovka po úvodní inicializaci.
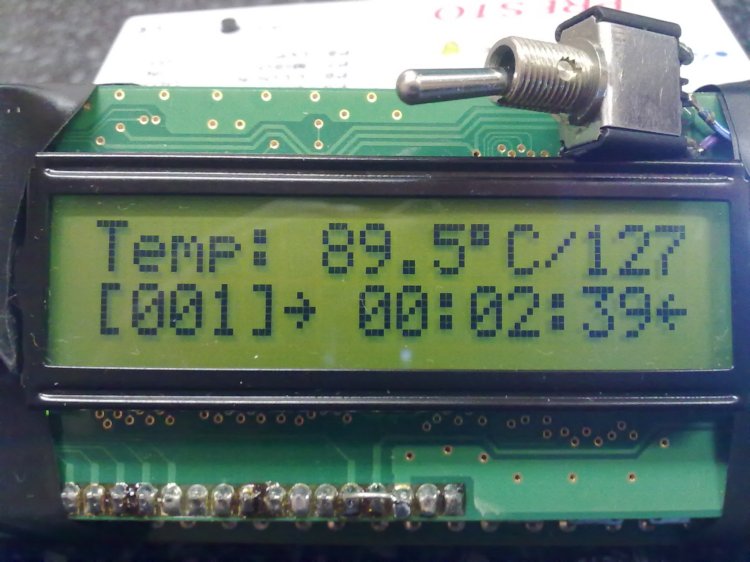
Zkouška na stole na vývojové desce. Aktuální teplota 89.5°C, maximální teplota 127°C. První start a běh motoru přes dvě minuty.
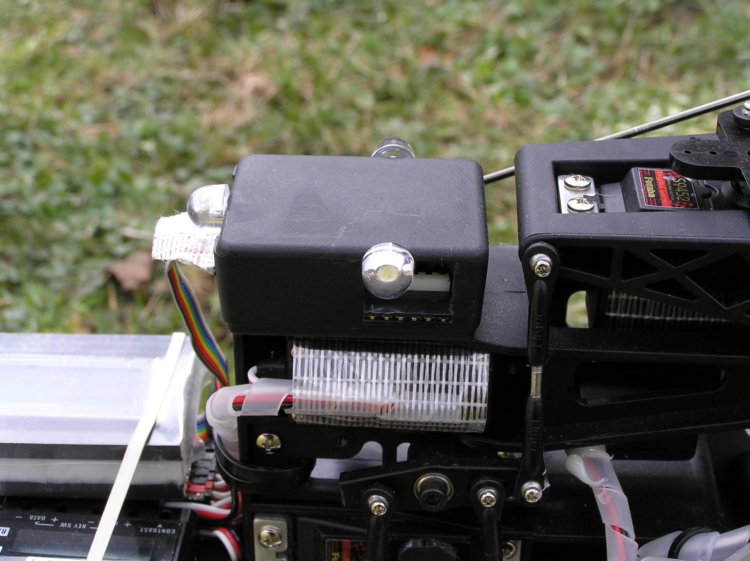
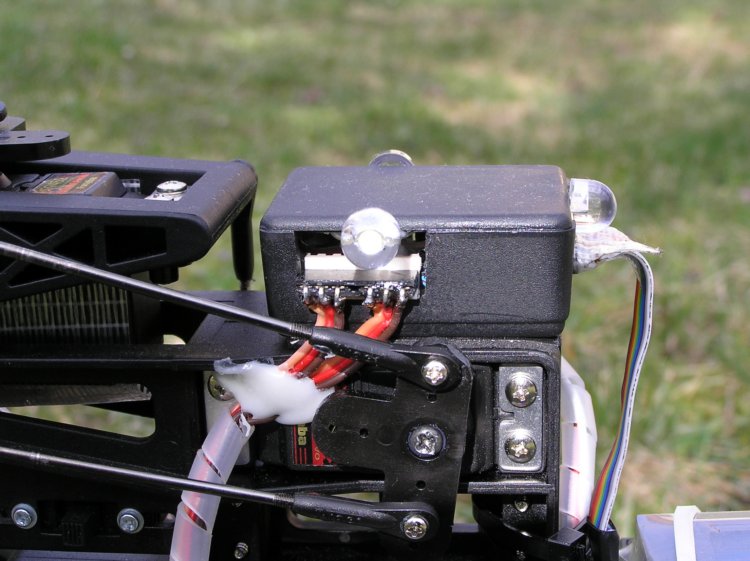
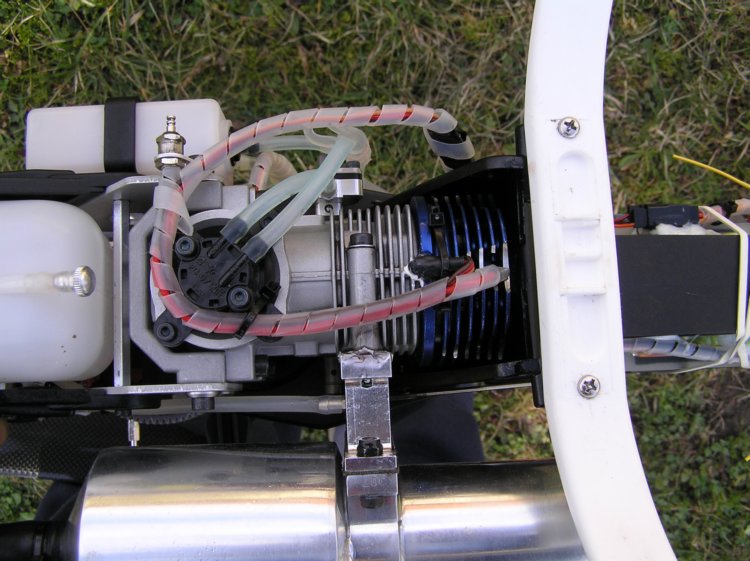
Pár ukázek instalace v modelu Raptor 60.
Displej je možné odpojit a vyndat. Drží jen na gumičkách.
Umístění teplotního čidla na motoru. Těsně pod hlavou na bloku motoru na zadní straně. Zde je prakticky nejvyší a nejstálejší teplota motoru. Čidlo je v pouzdře tranzistoru TO-92. Jedná se o digitální čidlo DALLAS a komunikaci s ním zajišťuje PIC po 1Wire sběrnici. Čidlo je zajištěno stahovací páskou, lehce zakáplé vteřinovým lepidlem a na styčné ploše je teplovodivá pasta.
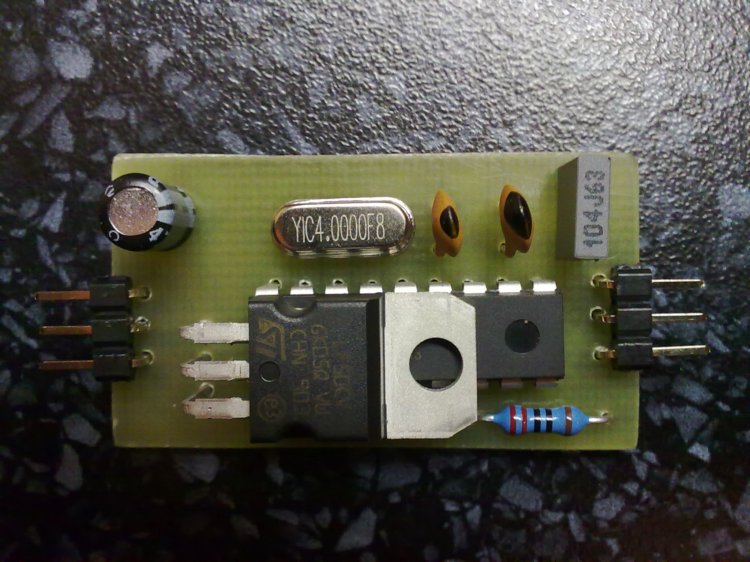
Tohle je zařízení pracující samo o sobě. Během vývoje zařízení nebylo plánováno snímání běhu motoru ze snímače GV-1. Zde je druhý PIC, který softwaerově měří chod motoru a posílá aktivní signál do počítadla v momentě, kdy má motor více jak 2500 otáček za minutu. Rovněž obsahuje stabilizátor 5.0V a tak je možné použít napájení přímo z modelu i za podmínky vyšího provozního napětí v jeho síti.
Zde je druhé pomocné zařízení se stabilizátorem napětí pro oba PIC. Vlevo vstup od snímače GV-1 a napájení, vpravo pak výstup stabilizovaného napětí 5.0V a výstup pro počítadlo jako vstup od motoru.
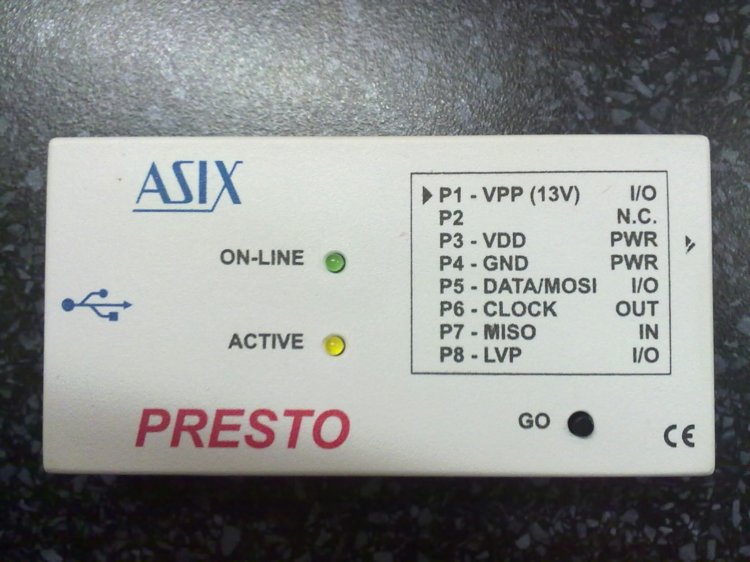
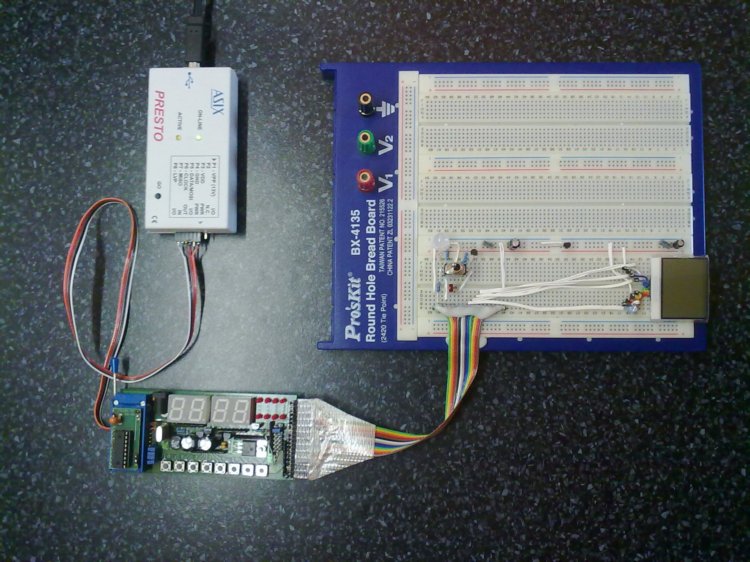
Programátor Presto do firmy ASIX. Umí jak PIC, tak různé EEPROM a další mikroprocesory a pěměti různých firem. Ideální pomocník, dobrý poměr cena / funkce.
Připojení kabelu pro TFT displej 2x16 znaků s řadičem HD 44780.
Tak takhle celé zařízení vzniklo. Na vývojové desce PVK pro.
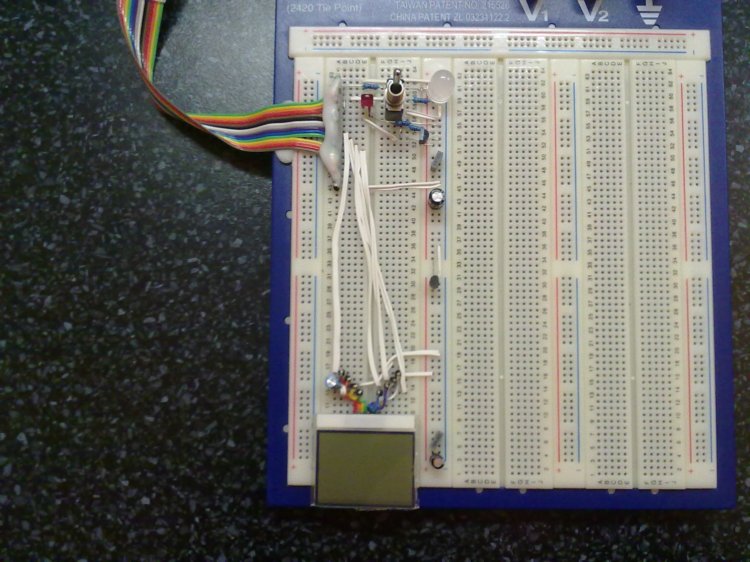
A tady se připravuje již druhá verze počítadla pro Raptora 60 s daleko menším displejem ze staré Nokie 3310. Ukázka vývojové / bastl desky.
Zde je vývojová deska počítadla ve verzi dvě propojena s vývojovou deskou PVK Pro a připojena na programátor Presto.
|